
تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور

04
مهر
در این مطلب می خوانید
امروزه اندازهگیری موقعیت یا جابجایی جسم متحرک امری ضروری در صنعت تلقی میشود، بدین منظور از حسگرهای مختلفی اعم از انکودرها و تاکوژنراتورها بهره میبرند. اصلیترین تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور ساختار آنها است. انکودر در تبدیل حرکت زاویهای یا خطی به سیگنالهای الکتریکی نقش دارد که از این سیگنالها میتوان برای اندازهگیری موقعیت، سرعت و یا شتاب استفاده کرد.
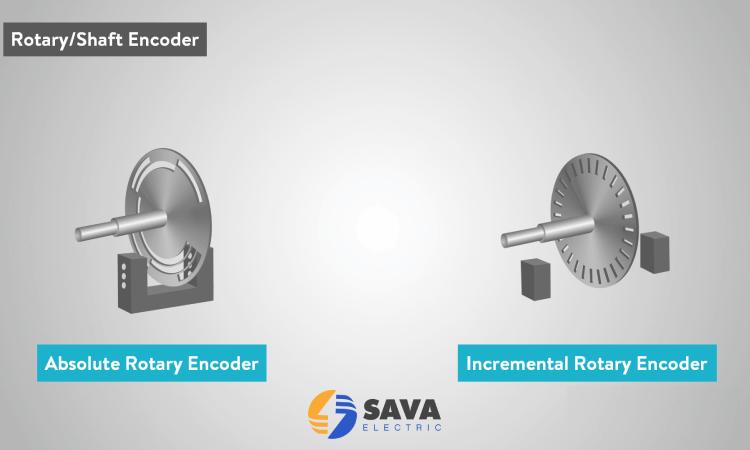
انکودرهای محوری به دو دسته کلی مطلق و افزایشی تقسیمبندی میشوند که علیرغم عملکرد مشابه، تفاوتهایی در نحوه کدگذاری نیز دارند. تاکوژنراتورها اولین نسل از سیستمهای کنترل حرکت محسوب میشوند که اگرچه برای اندازهگیری سرعت چرخش یا زاویهای اجسام مناسب هستند، اما به طور مستقیم موقعیت را اندازهگیری نمیکنند. در ادامه این مقاله از ساوا الکتریک به بررسی دقیق ویژگیها، نحوه عملکرد و تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور خواهیم پرداخت.

انواع مدل انکودر های مختلف
پیش از بررسی تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور، بهتر است تا با انواع مدل انکودرها آشنا شوید. انکودر دستگاه الکترومکانیکی است که به تبدیل مشخصات حرکت اعم از سرعت، مکان و جهت چرخش به سیگنال الکتریکی میپردازد و این سیگنال را با استفاده از یک کنترلر (مانند PLC) میخواند. انکودر میتواند از سیگنال بازخورد برای تعیین موقعیت، سرعت یا جهت بهره ببرد؛ یعنی در واقع کنترلر از این اطلاعات برای ارسال یک فرمان و عملکرد خاص استفاده میکند که این عملکرد میتواند افزایش سرعت یا تغییر جهت موتور در دستگاه باشد.
انکودرها از روشهای ویژهای برای ایجاد سیگنال استفاده میکنند که از جمله مهمترین آنها میتوان مکانیکی، مغناطیسی، مقاومتی و نوری را نام برد. لازم به ذکر است که روشهای مغناطیسی و نوری نسبت به سایر روشها رایجتر هستند. همانطور که پیشتر نیز ملاحظه کردید، به طور کلی انکودرها به دو دسته افزایشی و مطلق طبقهبندی میشوند.
انکودر افزایشی چیست؟
برای درک تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور، باید ابتدا با تعریف هر یک از آنها به طور کامل آشنا شوید. نحوه کار انکودر افزایشی بدین صورت است که سیگنال و پالس را به ازای گردش به کنترلر ارسال کرده و مقدار سرعت و جابجایی را با توجه به میزان پالسها در زمان محاسبه میکند. خروجی انکودر افزایشی به صورت یک سیگنال (کانال A) و یا دو سیگنال (یک کانال A و B) است که برای تعیین چرخش تنظیم میشوند. تولید قطار پالس مربعی و بعضاً سینوسی در دو کانال A و B را میتوان اساس کار این انکودرها دانست. در مجموع انکودر افزایشی از دو کانال خروجی A و B به عنوان سیگنالهای اصلی و یک خروجی Z برای تعیین جهت اندازهگیری، مقدار جابجایی، جهت و زاویه حرکت بهره میبرد.

نقاط مرجع از دیگر نکات مهم در رمزگذاری یک انکودر افزایشی محسوب میشوند، چرا که این علائم نقش راهنمای آن را دارند. انکودر افزایشی در صورت قطع برق با از دست دادن موقعیت مطلق خود، به فرآیند هومینگ (بازگشت به یک نقطه مرجع) برای تعیین مجدد موقعیت نیاز دارد. انکودرهای افزایشی به دلیل ساختار سادهتر نسبت به انکودرهای مطلق، قیمت ارزانتری دارند و در نتیجه بیشتر در صنعت مورد استفاده قرار میگیرند. با این وجود این دستگاهها معایبی نیز دارند که از جمله آنها میتوان از بین رفتن نتایج در صورت قطعی برق و نیاز به هومینگ و تعیین یک نقطه مرجع را نام برد.

انکودر کوادراتور یا ربع سیکلی چه نوع انکودری است؟
در بخش قبلی با انکودرهای افزایشی آشنا شدید، اکنون نگاهی کوتاه بر نوع خاصی از آن نیز خواهیم داشت. انکودر کوادراتور که آن را انکودر ربع سیکلی نیز مینامند در دسته انکودرهای افزایشی قرار میگیرد. دو ردیف شیار بر روی دیسک این نوع انکودر وجود دارد و خروجی آن به صورت دو خط پالس (کانالهای A و B) است که از اختلاف فاز میان آن دو کانال میتوان برای تعیین راستای دوران (ساعتگرد یا پادساعتگرد) استفاده کرد. ناگفته نماند که به اختلاف فاز میان دو سیگنال پالسی خروجی اصطلاحاً ربع سیکلی یا کوادراتور میگویند.
انکودر مطلق چیست؟
آشنایی با انکودر مطلق نیز خالی از لطف نیست، چرا که بدین صورت بهتر میتوان تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور را درک کرد. انکودر مطلق برخلاف انکودر افزایشی به اندازهگیری دقیق موقعیت زاویهای میپردازد. این فرآیند به وسیله یک حسگر (نوری، خازنی و یا مغناطیسی) و ارسال کد منحصربهفرد هر موقعیت از دیسک در حال چرخش انجام میشود.
انکودرهای مطلق در دو نوع تک دور و چند دور تولید شدهاند. انکودر تک دور دادههای موقعیتیابی را در یک دور کامل 360 درجه نمایش میدهد و در دورهای بعد نیز کماکان همان مقدار اولیه را ارائه میکند، در مقابل انکودر چند دور یک شمارنده اضافه دارد که در هر تعداد دور موقعیت خود را حفظ کرده و مقادیر را به درستی نشان میدهد. حفظ جایگاه خود در هنگام قطعی برق و موقعیتیابی مداوم، عدم نیاز به پشتیبانی باتری برای جلوگیری از نابودی اطلاعات، مناسب برای استفاده در پروژههای نیازمند به ایمنی عملکردی و برخورداری از رابط چندگانه برخی از مهمترین مزایای انکودرهای مطلق هستند.
ویژگی و خروجی انکودر های مطلق به چه صورت است؟
در این بخش از تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور، به بررسی ویژگی انکودرهای مطلق خواهیم پرداخت. انکودر مطلق از چندین شیار بر روی دیسک انکودر برخوردار است که پنجرههای پالسی بر روی آنها به صورت کدهای مشخصی منظم شدهاند. این نوع انکودرها با بهرهگیری از الگوهای معین پنجرههای پالسی، قابلیت استفاده از یک کلمه دیجیتالی مختص به هر موقعیت زاویهای انکودر را دارند. در واقع انکودر مطلق علاوه بر نمایش تغییر موقعیت، میتواند موقعیت مطلق را به فرم دسیمال کد باینری شده نیز ارائه دهد.
اگرچه معمولاً انکودر مطلق برای اندازهگیری قسمتی از یک دوران خاص کاربرد دارد، اما به واسطه شیار اصلی ایجادکننده پالس اندیس میتوان به اندازهگیری تعداد دوران کامل دیسک نیز پرداخت.
تاکوژنراتور چیست؟
درک بهتر تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور مستلزم آشنایی با تعریف کلی تاکوژنراتور و نحوه عملکرد آن است. تاکوژنراتور دستگاه الکترومکانیکی بوده که به تولید ولتاژی متناسب با سرعت شفت موتور میپردازد و در دسته ابزارهای اندازهگیری دقیق قرار دارد. انواع تاکوژنراتور بر اساس نوع ولتاژ، عملکرد و مدل طراحی به دو گروه تقسیمبندی میشوند:

- تاکوژنراتور DC
آرمیچر، آهنربا، مقاومت متغیر، ذغالها، کموتاتور و ولتمتر از جمله پارتهای یک تاکوژنراتور DC هستند. نیروی محرکه زمانی جریان را ایجاد میکند که رسانای الکتریکی در میدان مغناطیسی در حرکت باشد و این امر بیانگر عملکرد تاکوژنراتور DC است. میزان نیروی محرکه القایی به پارامترهایی مانند میزان سرعت و قطب مغناطیسی بستگی دارد.
نحوه کارکرد تاکوژنراتور DC بدین صورت است که حرکت شفت بین شار مغناطیسی و میدان آهنربایی منجر به ایجاد نیروی محرکه القایی در سیمپیچ شده که در نتیجه ولتاژ را در خروجی تاکوژنراتور تولید میکند. از مزایای تاکوژنراتور DC میتوان به قیمت پایین، عملکرد ساده و ولتاژ خروجی ثابت اشاره کرد. در مقابل این تاکوژنراتور معایبی نیز دارد که نیازمند به سرویس دورهای کموتاتور و ذغالها از جمله مهمترین آنها است.
- تاکوژنراتور AC
این نوع تاکوژنراتورها نیز از آرمیچر و میدان مغناطیسی گردان و ثابت برخوردار هستند که میدان مغناطیسی چرخشی، نیروی محرکه القایی در سیمپیچ روتور را به وجود میآورند. بدنه روتور از جنس آلومینیوم با حداقل اینرسی بوده که واقع در بین دو سیمپیچ است. در مجموع به دلیل رابطه مستقیم ولتاژ القایی با سرعت گردش، گردش روتور بین میدان مغناطیسی در سیمپیچ استاتور باعث تولید ولتاژ میشود. هزینه نگهداری پایین از جمله مهمترین مزیت این نوع تاکوژنراتور بوده و در مقابل قیمت خرید بالا از معایب آن است.
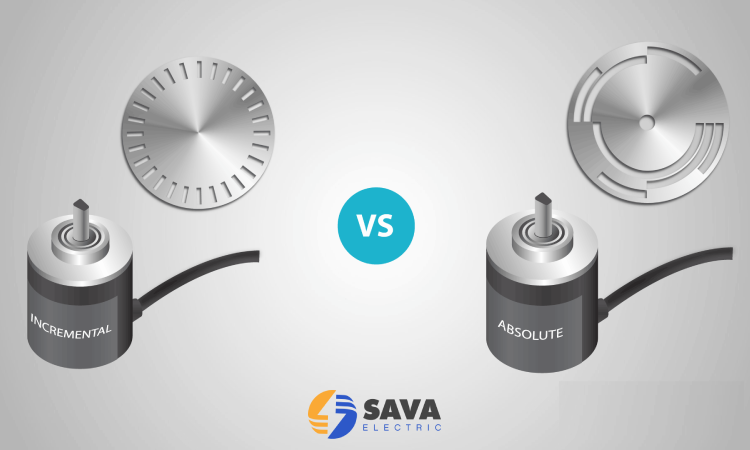
تفاوت انکودر مطلق و افزایشی
پیش از بررسی کلی تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور، بد نیست تا در ابتدا به مقایسه انکودرهای مطلق و افزایشی بپردازیم. همانطور که پیشتر نیز به آن اشاره شد انکودرهای افزایشی با خاموشی دستگاه، موقعیت قبلی خود را از دست میدهند و از صفر شروع میکنند.
در مقابل سیگنال خروجی ارسال شده توسط انکودرهای مطلق نشاندهنده موقعیت دقیق آنها است و این امر به دلیل آن بوده که انکودرهای مطلق توانایی حفظ موقعیت دقیق شفت را در زمان قطعی برق دارند. در نتیجه به محض روشن شدن موقعیت را مشخص میکنند و معمولاً نیازی به کالیبراسیون نیست. در اغلب موارد انکودرهای افزایشی قیمت ارزانتری دارند و مقرون بهصرفهتر هستند، در مجموع انتخاب هر یک از آنها به کاربرد مورد نیاز بستگی خواهد داشت.
تفاوت تاکوژنراتور و انکودر
در نهایت نوبت به هدف اصلی مقاله یعنی بیان تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور میرسد. در واقع تاکوژنراتور یک ژنراتور کوچک DC بوده که چرخش شفت متصل به آن منجر به تولید ولتاژ متناسب با سرعت میشود که خروجی آن به صورت یک سیگنال آنالوگ است. این دستگاه برای اندازهگیری سرعت دقیق در ناحیه وسیع و کنترل سرعت موتورهای DC کاربرد دارد. از مزایای این دستگاه میتوان به ساختار ساده، قیمت اقتصادی و پاسخ سریع به تغییرات سرعت اشاره کرد. دقت پایین تاکوژنراتور در موقعیتیابی دقیق نسبت به انکودرها، حساسیت به نویز و تداخل الکترومغناطیسی و همچنین نیاز به تقویتکننده برای تقویت سیگنال خروجی از جمله معایب آن هستند.
همانطور که پیشتر نیز ملاحظه کردید، انکودر وسیلهای بوده که وظیفه تبدیل موقعیت زاویهای یا خطی را به سیگنال دیجیتال بر عهده دارد و گزینهای مناسب برای اندازهگیری سرعت و موقعیت دقیق و همچنین کنترل حرکت موتورهای پلهای به حساب میآید. دقت بسیار بالا در اندازهگیری موقعیت، توانایی تعیین موقعیت مطلق و عدم حساسیت به نویز و تداخل الکترومغناطیسی از جمله مهمترین مزیتهای انکودرها محسوب میشوند. با این وجود این دستگاهها نسبت به تاکوژنراتورها اندکی از قیمت بالاتری برخوردار هستند. در مجموع اصلیترین تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور مربوط به نحوه عملکرد آنها است.
جمع بندی
در مقاله تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور به طور کامل انواع انکودرها و تاکوژنراتورها بررسی شدند و دریافتید که این تجهیزات علیرغم وظیفه مشابه، تفاوتهایی نیز دارند که آنها را برای استفاده در کاربردهای مختلف مناسب میسازد. مطابق با مطالب گفته شده، شناخت تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور برای انتخاب و استفاده صحیح از آنها بسیار حائز اهمیت است. البته ناگفته نماند که این تفاوتها ناشی از برتری یک دستگاه بر دیگری نبوده و فقط بیانگر طراحی منحصربهفرد هر یک از آنها است؛ لذا هر سه دستگاه میتوانند در کاربردهای مختص به خود، بهترین عملکرد را داشته باشند. در نهایت از اهمیت تهیه نمونه مرغوب انکودر نیز نمیتوان غافل شد، چرا که کارکرد صحیح دستگاهها در گرو کیفیت آنها است. مطمئنترین راه برای خرید انواع انکودرها را میتوان مراجعه به فروشگاههای معتبر همچون ساوا الکتریک دانست که اصالت تمامی محصولات را تضمین میکند.
سوالات متداول
- انتخاب انکودر مناسب به چه عواملی بستگی دارد؟
به طور کلی انتخاب انکودر به نیازهای پروژه وابسته است و باید در هنگام انتخاب آن به پارامترهایی مانند رزولوشن، دقت، سرعت، اندازه و هزینه توجه داشت.
- مهمترین تفاوت انکودرهای مطلق و افزایشی و تاکوژنراتور چیست؟
نحوه اندازهگیری و ارائه اطلاعات اصلیترین تفاوت آنها است؛ به عنوان مثال انکودر مطلق موقعیت دقیق یک محور در هر لحظه، انکودر افزایشی تغییرات موقعیت و تاکوژنراتور سرعت زاویهای را اندازهگیری میکند.
- انکودر مطلق چه مزایایی دارد؟
از جمله مزایای آن میتوان دقت بالا، حفظ موقعیت پس از قطع برق و مناسب برای کاربردهای پیچیده را نام برد.

